Basic of Probability
Important Definition
- Random Experiments
- An experiment is said to be random if its results cannot be determined beforehand.
- Sample Space
- The set \(\Omega\) of all possible results of a random experiment is called sample space
- A space that contains all possible outcomes / samples
- Sample may be numerical or non-numerical
- Example
- E: Tossing a coin
- : \(\Omega = \{H, T\}\)
- E: Rolling a die
- : \(\Omega = \{1,2,3,4,5,6\}\)
- E: # of calls ongoing in telephone exchange
- : \(\Omega = \{ 0, 1, 2, \cdots, \infty \}\)
- E: Temperature of a particular city
- : \(\Omega = \{x \vert 0 < x < 50^o C \}\)
- E: Tossing a coin
- The \(\sigma\) field
- A collection \(F\) of subsets of \(\Omega\) is called a \(\sigma\) field over \(\Omega\)
- Condition:
- (1) \(\Omega \in F\)
- (2) If \(A \in F\), then \(A^c \in F\), where \(c\) means complement
- (3) If \(A_1, A_2 , cdots, \in F\), then \(U^\infty_{i=1} A_i \in F\)
- Example
- (1) \(\begin{aligned} \Omega &= \{H, T \} \\ F &= \{ \emptyset, \{H\}, \{T\}, \Omega\} \\ F_0 &= \{\emptyset, \Omega\}, \text{which is also called the trivial } \sigma \text{ field} \end{aligned}\)
- (2) \(\Omega = \{a, b, c\}\)
- : \(F_0 = \{\emptyset, \Omega\}\)
- : \(F= \{\emptyset, \{a\}, \{b,c\}, \Omega \}\)
- : \(F = \{ \emptyset, \{a\}, \{b\} \{c\}, \{a,b\}, \{b,c\}, \{c,a\}, \Omega \}\) - (3) \(\Omega = \mathbb{R} = \{x \vert -\infty < x < \infty \}\)
- : \(F_0 = \{\emptyset, \Omega\}\)
- : \(F = \{ \emptyset, \{a\}, (a,b), (a,b], [a,b), [a,b], (-\infty, a),[a, \infty), (a, \infty), \Omega\}\), which is also called Borel \(\sigma\) field on the real line.
- Condition:
- A collection \(F\) of subsets of \(\Omega\) is called a \(\sigma\) field over \(\Omega\)
- Probability
- Let \(\Omega\) be a sample space
- Let \(F\) be a \(\sigma\) field over \(\Omega\)
- A real value set function \(P\) defined on \(F\) is called a probabilty if satisfying
- \(P(A) \geq 0\) for all \(A \in F\)
- \[P(\Omega) = 1\]
- If \(A_1, A_2, \cdots\) are mutually disjoint events inf \(F\), then \(P(U_{i=1} A_i) = \sum_i P(A_i)\)
- The triplet \((\Omega, F, P)\) is called a probability space
- Elements of \(\Omega\) is called sample; Elements of \(\F\) is called events
Review of Probability
Sample space \(\Omega\)
- a set
- element of \(\Omega\) : outcomes
- subset of \(\Omega\) : events
Set theory
- Set: a collection of distinct element
- Let \(\Omega: \text{sample space}; A,B \in \Omega\)
- Union: \(A \cup B = \{x\in \Omega \vert x \in A \text{ or } x \in B \}\)
- Intersection: \(A \cap B = \{x \in \Omega \verb x \in A \text{ and } x \in B \}\)
- Complement: \(A^c = \{ x\in \Omega \vert \notin A \}\)
- Difference: \(A\B = \{ x \in \Omega \vert x\in A \text{ and } x \notin B\}\)
\(\sigma\) field or \(\sigma\) algebra
- Denote as \(F\), a collection of events
- : \(F\) represents the set of events for which the probability can be defined
- \[\Omega \in F\]
- If \(A \in F\), then\(A^c \in F\)
- If \(A_1, A_2, ..., \in F\), then \(A_1 \cup A_2 \cup ... \in F\)
- If (3,4,5) condition fulfilled, then \(F\) is an algebra
Measurable space
- If we get (\(\Omega, F\)) together, we call it as measurable space, as \(F\) contains all the subsets for which we can measure the probability
Probability
- Let us have a measurable space (\(\Omega, F\)), then we define a function \(P_r: F \to [0,1]\), where \(P_r\) is a function to map measurable space to finite number
- \[\forall A \in F, 0 \le P_r(A) \le 1\]
- \[P_r(\Omega) = 1\]
- If \(A, B \in F, A \cap B = \emptyset\), then \(P_r(A \cup B) = P_r(A) + P_r(B)\)
- Extend of 3, If \(A_1, A_2, \cdots\) are mutually disjoint events inf \(F\), then \(P(U_{i=1} A_i) = \sum_i P(A_i)\)
- If (1,2,3) fulfilled, \(P_r\) is called probability measure
Probability Space
- (\(\Omega, F, P_r\)) is a triplet, formed a probability space
Conditional Probability
- Let say we have events A,B
- then \(P_r(B\vert A) = \frac{P_r(A \cap B)}{P_r(A)}\)
- If \(P_r(B\vert A) = P_r(B)\), then A and B are independent
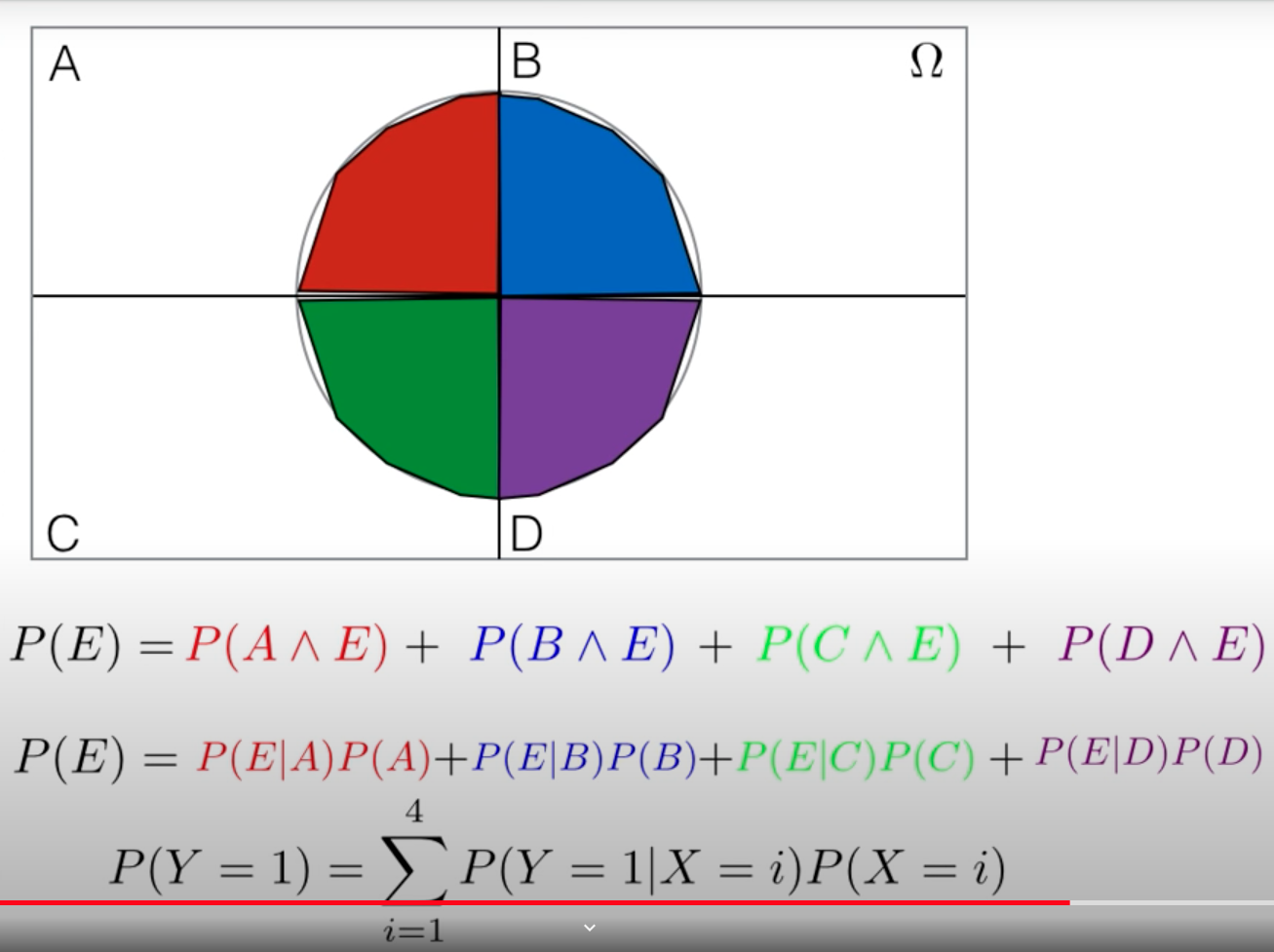
Partition of \(\Omega\)
- We define a sample space to a collection of subsets. They are multually disjoint.
- Let say we have \(\{A_1, A_2, ..., A_k \}\)
- The maths expression: \(\cup^R_{i=1}A_i = \Omega\)
- \[A_i \cap A_j = \emptyset (i\neq j)\]
- Partitiaion Thm (law of total probability)
- : \(\begin{aligned} P_r(B) &= P_r(\cup^R_{i=1} (B \cap A_i)) \\ &= \sum^R_{i=1} P_r(B \cap A_i), \text{as } A_i \text{ are mutually exhausive} \\ &= \sum^R_{i=1} P_r(B\vert A_i)\cdot P_r(A_i) \end{aligned}\)
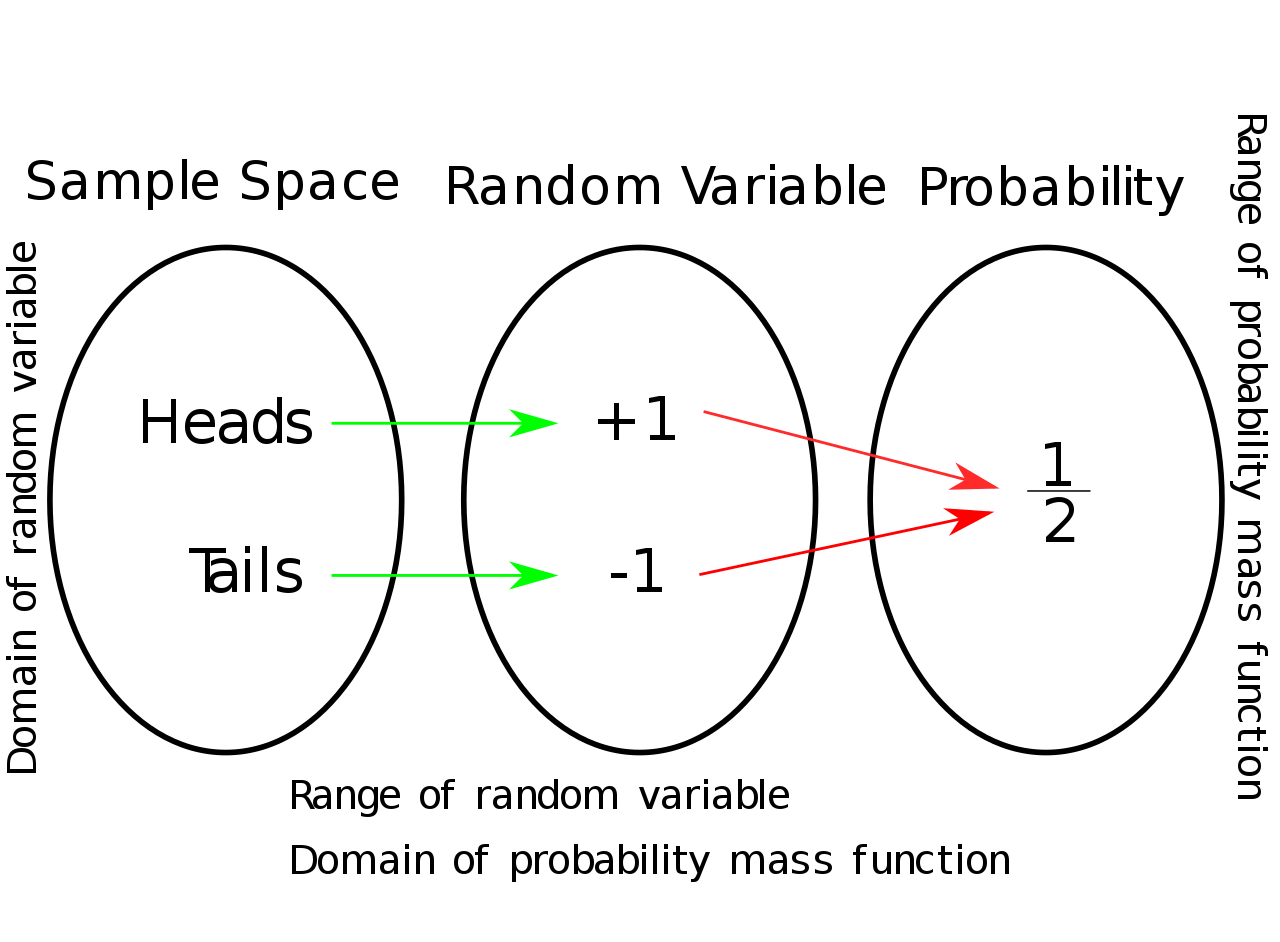
Random variable \(X\)
- Random variable \(X\) is not a variable, it is a function that map \(X:\Omega \to \mathbb{R}\)
- If \(X(\Omega)\) is discrete, then \(X\) is discrete, so for continuous
Shorthand notation \(P_r(X \le x)\)
- :\(X\) is random variable
- :\(x\) is a number
- :\(P_r(X \le x) = P_r(\{\omega \in \Omega \vert X(\omega) \le x\})\)
Probability Mass function
- :\(X\) is discrete
- : \(P(x_i) = P_r(X=x_i) = P_r(\{\omega \in \Omega \vert X(\omega) = x\})\)
- \[) \le P(x_i) \le 1; i=1,2,\cdots\]
- \[\sum^infty_i=1 P(x_i)=1\]
- :\(P_r(X \le x_i) = \sum^R_{i=1}P(x_i)\), also known as cumulative distribution function
Probability Density function
- :\(X\) is continuous
- \[P(X=x) =0\]
- \[P(x_1 < X < x_2) = \int^{x_2}_{x_1} f(x) dx\]
- Property:
- : \(f(x) \ge 0\), but \(f(x)\) itself can be greater than 1
- Culmulative Density Function (CDF) \(F(x) = P_r(X\le x) = \int^x_-\infty f(x) dx\)
Expected Value (Means)
- Discrete
- \[\mathbb{E}(x) = \sum_i x_i P_r(x_i)\]
- Continuous
- \[\int^\infty_{-\infty} xf(x) dx\]
- Both case can we express as
- \[\mathbb{E}(x) = \int_v x P_r(dx)\]
Variance
- \[Var = \mathbb{E}((X - \mathbb{E}(x))^2) = \int_v (x-\mathbb{E}(x))^2P_r(dx)\]
- \[Var = \begin{cases} \sum_i(x_i-\mathbb{E}(x))^2 P_r(x_i)\\ \int^\infty_{-\infty} (x-\mathbb{E}(x))^2f(x)dx \end{cases}\]
-
Previous
Review: Generative Modeling by Estimating Gradients of the Data Distribution -
Next
Review: SRDiff: Single Image Super-Resolution with Diffusion Probabilistic Models